大家好,今天小编关注到一个比较有意思的话题,就是关于纠偏装置的问题,于是小编就整理了2个相关介绍纠偏装置的解答,让我们一起看看吧。

盾构纠偏的方法和原则?
盾构纠偏是指在盾构施工过程中,当盾构机偏离设计轨道时,采取措施将其重新纠正回来。以下是盾构纠偏的方法和原则:
监测与预警:在盾构施工过程中,通过安装各种监测设备,如激光测距仪、倾斜仪等,实时监测盾构机的位置和姿态。一旦发现偏离设计轨道,及时发出预警信号。
调整刀盘姿态:盾构机的刀盘姿态对于施工的准确性至关重要。通过调整刀盘的倾斜角度和旋转角度,可以使盾构机重新对准设计轨道。
调整推进力和转速:盾构机的推进力和转速对于纠偏也有一定影响。通过调整推进力和转速的大小,可以改变盾构机的行进方向和速度,使其重新回到设计轨道。
调整注浆量和注浆压力:注浆是盾构施工中常用的一种纠偏方法。通过调整注浆量和注浆压力,可以改变土体的力学性质,从而对盾构机的运动轨迹产生影响,使其重新对准设计轨道。
人工干预:在一些特殊情况下,需要进行人工干预来纠偏。例如,使用液压顶推装置或手动操作来调整盾构机的位置和姿态,使其重新回到设计轨道。
在进行盾构纠偏时,需要遵循以下原则:
安全第一:在进行盾构纠偏时,要确保施工人员的安全。采取必要的安全措施,如设置警示标志、限制施工区域等,防止发生意外事故。
及时响应:一旦发现盾构机偏离设计轨道,要及时响应并采取纠偏措施。延误时间可能会导致问题进一步恶化,增加纠偏的难度。
渐进调整:在进行盾构纠偏时,应该采取渐进调整的方法。即逐步调整盾构机的位置和姿态,避免过大的调整幅度,以免对盾构机和周围环境造成不必要的影响。
综合考虑:在选择纠偏方法时,要综合考虑各种因素,如地质条件、盾构机的性能、施工进度等。选择最合适的纠偏方法,以确保施工的顺利进行。
需要注意的是,盾构纠偏是一项复杂的工作,需要由经验丰富的专业人员进行操作。在进行盾构施工时,应严格按照设计要求和相关规范进行操作,确保施工的安全和质量。
krd纠偏控制器的设置?
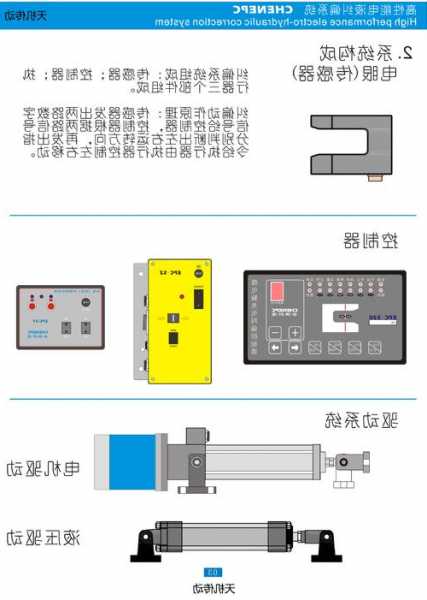
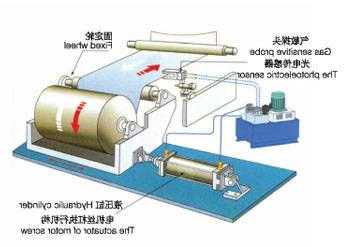
天机传动-KRD伺服纠偏控制器伺服电机一体机的原理如下:
1、由纠偏感应器B发出红外光/超声波/激光/可见光监测卷材的运行,将信号发送给控制器A。
2、控制器发现卷材有位置漂移后,根据控制者预先设定的指令,通过驱动器D控制纠偏框架C摆动,纠正卷材位置。
3、卷材自动纠偏系统使用光电传感器,检测卷材边缘位置,将测得的位置误差信号送入控制器,经过控制单元判断处理后,控制驱动电机,将发生偏差位置的卷材纠正到正确的位置。 纠偏系统提供几种不同的检测方式:
2、检边、跟线或对中。
3、其驱动系统使用低速同步、变频调速、步进及伺服电机驱动,驱动行程与卷材偏移量成严格的比例关系。
4、系统还可以配合不同的探头使用,以适合检测不同卷材的需要,如:红外线光电、模拟量红外线光电等。
5、微电脑数字式控制器为系统各项功能提供精确的控制。
krd纠偏控制器是一种自动控制装置,用于实现带材在生产或加工过程中的纠偏控制。
其设置需要根据不同的应用场景进行调整。
1. 设置矫正参数:在纠偏前,需要根据带材的实际宽度、材质、厚度等因素设置相应的矫正参数,进而实现精准的控制。
2. 选择工作模式:根据带材的实际情况,可选择手动或自动工作模式。
手动模式需要操作员手动控制,而自动模式则会根据预设参数进行自动控制。
3. 监控控制效果:在纠偏过程中,需要监控控制效果,并通过实时调整参数等方式来不断优化纠偏效果。
总之,krd纠偏控制器的设置需要不断根据实际情况进行调整来实现最佳纠偏效果。
到此,以上就是小编对于纠偏装置的问题就介绍到这了,希望介绍关于纠偏装置的2点解答对大家有用。
本文转载自互联网,如有侵权,联系删除